Arduino , petit bruit lors du transfert d'info
WiildLife
Messages postés
92
Statut
Membre
-
WiildLife Messages postés 92 Statut Membre -
WiildLife Messages postés 92 Statut Membre -
Bonjour,
Voila , un petit "soucis" je ne suis pas persuader que ceci en n'est un mes voila , je suis sur une Arduino MEGA 2560 , j'utilise des capteurs a ultrasons et le principe et plutôt simple , envoyer une impulsion , attendre , la recevoir et la traiter , le problème ici et que cette boucle est effectuer toute les micro micro seconde ( aucun delay n'est appliquer) alors on peut entendre un petit bruit , un petit clic clic , très rapide , je n'ai jamais entendu ça auparavant et je voulais savoir ci ceci est normal , je n'ai pas trouver de site qui en parlais en faisant des recherches.
Je m'excuse pour les fautes d'avances et vous remercie en avance !
Voila , un petit "soucis" je ne suis pas persuader que ceci en n'est un mes voila , je suis sur une Arduino MEGA 2560 , j'utilise des capteurs a ultrasons et le principe et plutôt simple , envoyer une impulsion , attendre , la recevoir et la traiter , le problème ici et que cette boucle est effectuer toute les micro micro seconde ( aucun delay n'est appliquer) alors on peut entendre un petit bruit , un petit clic clic , très rapide , je n'ai jamais entendu ça auparavant et je voulais savoir ci ceci est normal , je n'ai pas trouver de site qui en parlais en faisant des recherches.
Je m'excuse pour les fautes d'avances et vous remercie en avance !
1 réponse
-
Bonjour
Je n'ai pas la moindre idée si ce bruit est normal ou pas.
Par contre, le cadencent à 1 Mhz m'interpelle.envoyer une impulsion , attendre , la recevoir et la traiter
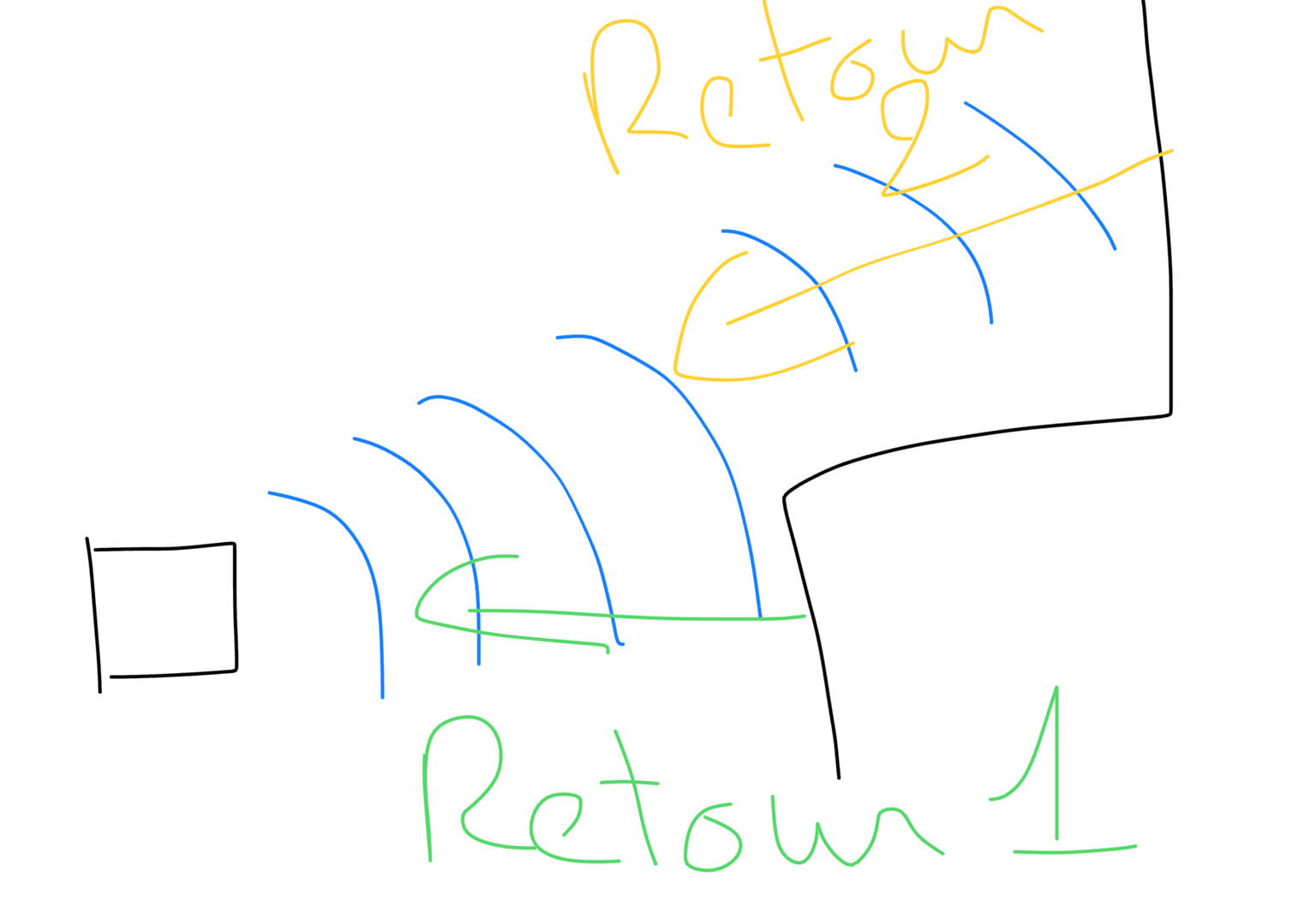
pour que ça marche bien, il ne faut pas envoyer une impulsion avant d'avoir reçu le(s) retour(s) de la précédente.
Dans les conditions de l'atmosphère standard, la vitesse du son est de 342m/s environ.
Il faut qu'en 1micro s le son ait fait l'aller/ retour. L'obstacle doit donc être à moins de 0,5 micros s de vol de ton impulsion, soit 342*5E-7 = 0,171mm
Si tu es plus loin que ça tu vas galère, comment vas tu distinguer- les pulses perdus (obstacle trop loin pour que le retour soit mesurable)
- 2 pulses sur 2 obstacles différents qui reviennent dans le désordres
- les multitrajets
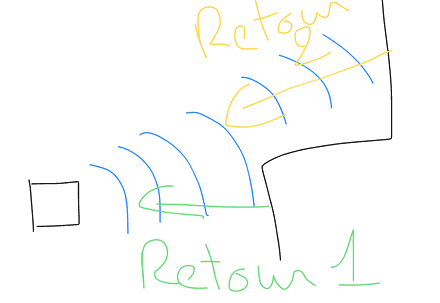
A mon sens, il faut que ton cadencement soit cohérent de la portée max de ton capteur (plus une petite marge).
Par exemple pour une porté de 1,7 m, l'aller / retour fait 3,4 m.
En cadençant à 100H, tu es sûr de ce que tu mesures:- 0 retour -> obstacle trop loin
- 1 retour -> 1 obstacle
- 2 ou plus -> plusieurs obstacle
Attention, si tu as des obstacle équidistants l'énergie des retours s'ajoutent, et si tu as des retours en inversions de phases, ils s'annulent 2 à 2.